
Küçük Robotlar
Tedavi amaçlı ilaçların vücutta hedeflenen bölgelere ulaştırılması için küçük robotların kullanımı konusunda çeşitli uygulamalar geliştiriliyor. Bu sayede ilaçlardaki etken maddelerin tedavi edilecek bölgeye ulaştırılması ve kontrollü bir şekilde salınımının sağlanması hedefleniyor. Aktif bir şekilde yönlendirilecek hareketi sağlanan mikro ve nano boyutlardaki parçacıklarla vücudun belli bölgelerine ilaç transfer edilmesi araştırmacıların son zamanlarda üzerine yoğun bir şekilde eğildikleri konular arasında dikkat çekiyor.
Dolaşım ve sindirim sisteminde ilaç, taşıyan robotların hareketi daha kolayken gözün camsı cisim bölgesi gibi yoğunluğu fazla ve doku ağlarının karmaşık olduğu bölgelerde hareket etmesi zorlaşıyor ve hedefe ulaşmak güçleşebiliyor. Araştırmacılar, üzerinde çalıştıkları nano boyutlardaki robot tasarımları ile bu sorunun üstesinden gelmiş görünüyorlar.

Nano Robotlar ne işe yarar?
Günümüze kadar biyolojik ortamda yönlendirilebilen az denilebilecek sayıda mikro sistem geliştirilmiştir. Bu sistemler, genellikle vücudun dolaşım ve sindirim sistemi gibi sıvı içeren bölgelerindedir. Kimyasal, mekanik ya da manyetik yolla itilerek hareket ettirilen yapılardan oluşuyor. Hayvanlar üzerinde gerçekleştirilen araştırmalarda, ilaç taşınmasında küçük robotların kullanılmasına ilişkin bazı kısıtlamalar tespit edilmiş. Örneğin yaklaşık 285 mikrometre çapında ve 1800 mikrometre uzunluktaki silindir şeklinde manyetik yapılarla gerçekleştirilen araştırmalarda, gözün camsı cisim bölgesinde hareketin kısıtlandığı belirlenmiş.Önceki araştırmalar ışığında, vücudun farklı ve daha yoğun yapıya sahip bölgelerinde ilaç transferinde kullanılan robotların kolayca hareket etmesini sağlayabilmek için boyut,şekil ve yüzey kaplamalarının hareket için uygunluğu gibi konuların önemli etmenler olduğu sonucuna ulaşılmış. Sonuç olarak, daha karmaşık doku ağlarından oluşan ya da yoğunluğunun fazla olduğu vücut bölgelerinde ilaç transferi için robotların kullanılmasının önünde aşılması gereken engeller bulunuyor.
Gözde Nano Robotlar
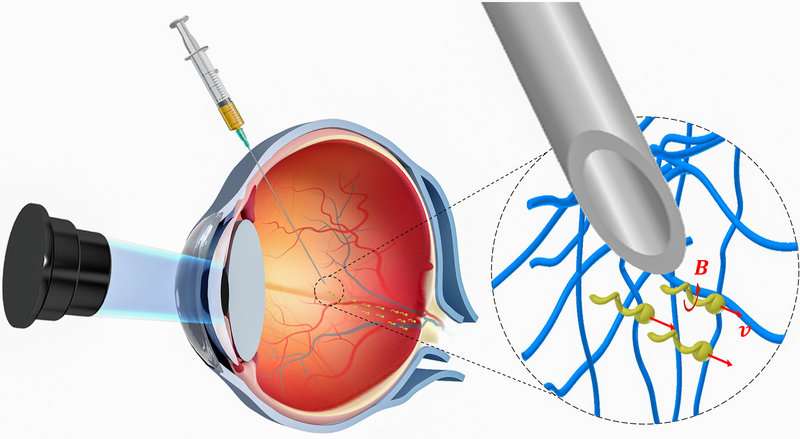
Gözde bulunan jel benzeri göz sıvısında ilerleyebilecek şekilde tasarlanan nano robotlar oftalmoloji (görme yolu hastalıkları ve cerrahisiyle ilgilenen tıp dalı) alanında önemli gelişmeler vaat ediyor.Geleneksel ilaç taşıyıcı sistemler, düzensiz pasif difüzyon prensipleriyle çalışır. Gözün arka kısmında hedeflenen bölgelere hızlı bir şekilde ilaç göndermede yetersiz kalabiliyorlar. Ayrıca pek çok doku bölgesinde bulunan sıkı makro moleküler yapılar da geleneksel sistemlerle taşınan ilaçların hedef noktasına ulaşmalarının önündeki en büyük engeli oluşturuyor. Zhiguang Wu ve arkadaşları bu sorunu aşmanın bir yolunu bulduklarını yayımladıkları makale ile duyurdular.
Makale: SCİENCEADVANCES

Max Planck Enstitüsü Akıllı Sistemler Bölümü öncülüğünde kontrollü ilaç salımı üzerine yürütülen araştırmalarda gözdeki gibi yoğun doku içeren bölgelerde kolaylıkla hareket edebilen ve şekilleri burguyu andıran robotlar geliştirildi. 500 nm genişlikten daha küçük çaba sahip (bir saç telinin çapının yaklaşık 200’de 1’i kadar) robotlar göz sıvısı gibi jele benzeyen bölgelerde rahatlıkla ilerleyebilecek şekilde tasarlandı. Nano boyutlardaki robotların şekilleri ve yüzey kaplamaları da ilerledikleri bölgelerde bulunan biyolojik yapılara zarar vermeyecek şekilde geliştirildi. Böylece nano robotların ilk defa yoğun doku ortamında hareketi gerçekleştirilmiş oldu. Bundan sonra ki araştırmaların amacı ise bu nano robotları tedavi edici unsurlarla yüklemek ve vücutta hedeflenen bölgeye etkili bir şekilde ulaştırmak.
Optik Koherans Tomografisi (OCT)
Optik Koherans Tomogragisi (OCT) müdahale gerektirmeyen bir görüntüleme sistemi olup gözdeki kesitlerin ışık kullanılarak detaylı görüntülenmesini sağlar.
Kullanılan ışık kaynağına bağlı olarak görüntünün çözünürlüğü artırılabilir. Gözdeki rahatsızlıkların (glokom( göz tansiyonu), sarı nokta hastalığı, retina rahatsızlıkları ve diyabetik göz hastalıkları gibi) tanılanmasında oldukça etkili bir yöntemdir. Çok kısa sürelerde hiçbir cerrahi işleme gerek duymadan gerçekleştirilebilen yöntem göze herhangi bir zarar da vermemektedir.
Nano Robotların Boyutu
Araştırmacılar yaptıkları ile ilk defa gözün vitröz bölgesinden (gözdeki lens ve retina arasında bulunan jele benzer, renksiz ve saydam bölge) geçerek retinaya ulaşabilen oldukça küçük sayılabilecek robotlar geliştirdiler. Vitröz bölgedeki gözeneklerin yaklaşık 500 nm boyutlarında olduğu göz önünde bulundurulduğunda, bu boyutlardan daha küçük robotların herhangi bir sorun olmadan ilerlemesi mümkün gözüküyor. Laboratuvarda vitröz bölge benzeri ortamlar oluşturularak yapılan çalışmalarda, 120 nm çapa ve 400 nm uzunluğa sahip manyetik özellikli burgu robotlar, başarılı bir şekilde hedeflenen mesafeleri katedip gözün retina bölgesine ulaştı.
Bu nano boyutlardaki robotlar temel olarak kafa ve kuyruk kısımlarından oluşuyor. Kafa kısmının çapı bir saç telinin çapının yaklaşık iki yüzde biri kadar. Bu ölçüde minik robotların vitröz bölgedeki ağ yapıdan geçebilmesi için yeterli küçüklükte oldukları anlamına geliyor. Robotların kuyruk kısmı ise yaklaşık 2 mikrometre uzunlukta burgu şeklinde yapılar. Robotların yapısı ile ilgili bir diğer önemli husus, manyetik alan ile hareket etmelerini sağlamak için nikel ya da demirden faydanılması.
Dışardan uygulanan manyetik alan sayesinde yüzeyleri kaplamış nano robotların kontrollü hareketi sağlanarak nano robot sürüleri göz küresinden retinaya 30 dakikada ulaştırıldı. Bu sırada robotların hareketleri de Optik Koherans Tomografisi (OCT) ile görüntülendi.
Biyolojik Ortam
Yapılan çalışmada, robotların biyolojik ortamda hareketine dair iki önemli kriter olduğu belirtiliyor:
- Robotların boyutlarının doku ağlarını ile uyumunun azami ölçüde olması,
- Robotların biyolojik ortamlarla etkileşimlerinin mümkün olan en düşük düzeyde gerçekleşmesi,
Araştırmanın temelini oluşturan bu iki kriteri sağlamak için gerçekleştirilen çalışmalar sonucunda kendi uzunluğunun 3 katı kadar mesafeyi bir saniye içerisinde kateden robotlar ortaya çıktı. Bununla birlikte, araştırmacılar nano robotların biyolojik ortamlarla olan etkileşimini azaltmak ve yüzeylere yapışmalarını engellemek için Nepenthes etobur bitkisinin yüzeyinde bulunan perflerokarbon bazlı yüzey kaplamalarından ilham aldı. Bu sayede robotların biyolojik dokular arasından engellenmeden hareket ettirilmesi başarıldı. Ayrıca yüzey kaplaması sayesinde robotların yüksek basınç ve fiziksel hasarlara karşı oldukça dayanıklı hale gelmesi ve raf ömürlerinin de uzaması sağlandı.

Çok küçük robotlarla gerçekleştirilen ilaç transferinin pasif difüzyonla ilaç salımına karşı üstün noktaları var. Gözde hedeflenen bölgenin oldukça küçük boyutlarda olduğu değerlendirildiğinde robotlarla etkili bir şekilde ilaç transferi gerçekleştirilebiliyorken pasif difüzyon ile bu kesinlikle bir transfer mümkün değil. Heterojen yapıdaki biyolojik ortamların homojen bir dağılıma izin vermemesi de pasif difüzyonun eksik yönlerinden sayılabilir. Hedeflenen bölgeye ulaşabilen robotlar ise daha düşük oranlarda yan etkilerin oluşmasını ve tedavi olasılığının artmasını garanti altına alıyor. Son olarak robotların göze enjekte edilmesinden sonra retina bölgesine ulaşması yaklaşık 30 dakika içerisinde gerçekleşiyor. Bu süre difüzyon yoluyla parçacıkların retinaya ulaşma süresinin yaklaşık onda biri kadar.
Araştırmacılar bundan sonraki süreçte, nano robotların göze enjeksiyonundan başlayarak, uzun mesafeli hareketlerini, bu hareketlerin anlık takibini ve hedef noktasında kontrollü bir şekilde ilaç salımını da kapsayan bütün bir prosedürün geliştirilerek oftalmoloji tedavilerinde etkin bir şekilde kullanımını hedefliyorlar. Bunlara ek olarak, geliştirilecek bütünleşik tedavi yönteminin vücudun farklı bölgelerine de uygulanma potansiyeli bulunuyor.
Kaynaklar:
PHYS, İNTERESTİNGENGİNEERİNG, SEEKER, AMERİCANACADEMYOFOPHTHALMOLOGY, BİLİM TEKNİK






Yorum Yap